- These notes were prepared while studying for technical interviews (e.g., Snap Inc., KRAFTON, etc.).
- Each entry contains a concise English summary, key math expressions, and excerpts from my original handwritten/typed study notes.
These notes cover two complementary directions for steering pretrained models: distilling knowledge from larger or self-supervised teachers, and bolting on adapter networks that inject external control signals into a frozen diffusion backbone.
Knowledge Distillation
- transfer knowledge from a teacher model to a student model
- student learns to match teacher outputs or intermediate features
Why used
- Compression: smaller model with similar accuracy
- Speed: faster inference (mobile / real-time)
- Regularization: teacher soft targets can improve generalization
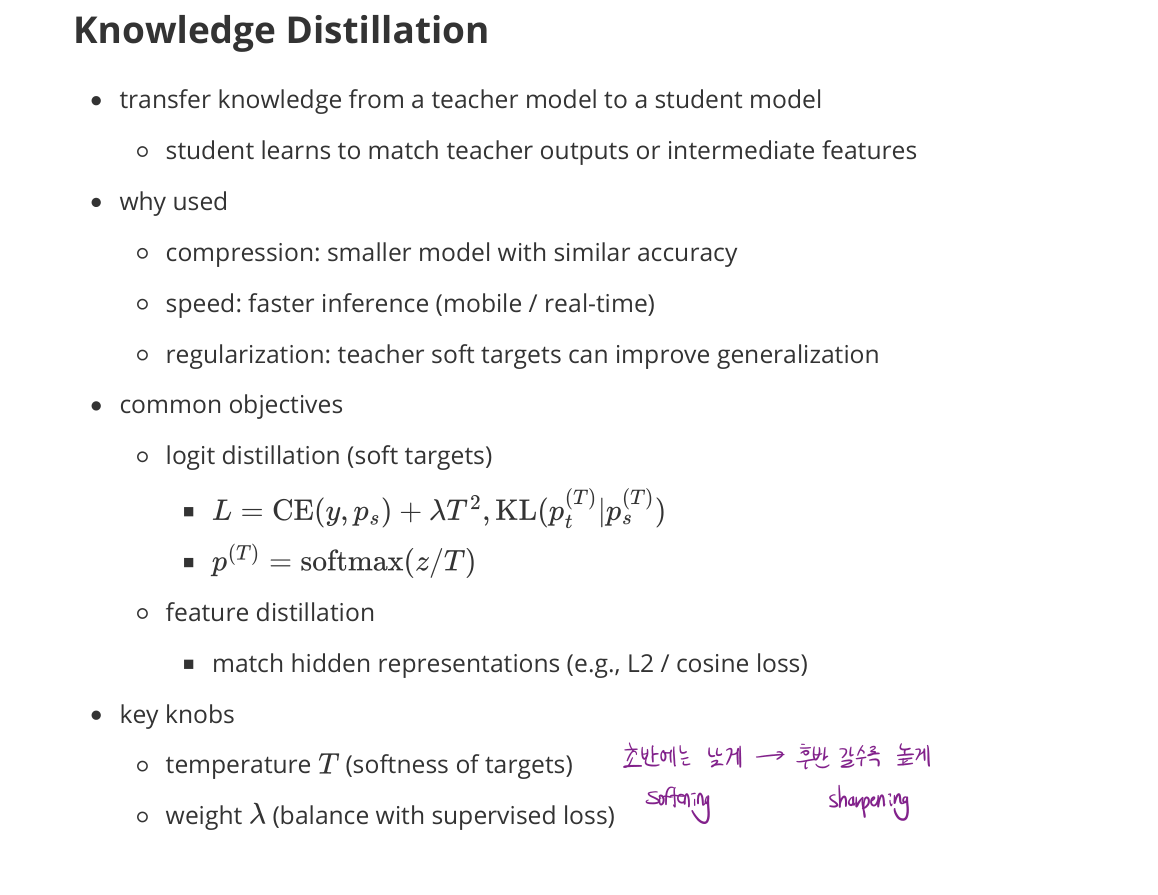
Common objectives
- Logit distillation (soft targets)
- $\mathcal{L} = \text{CE}(y, p_s) + \lambda T^2 \cdot \text{KL}(p_t^{(T)} \,|\, p_s^{(T)})$
- $p^{(T)} = \operatorname{softmax}(z / T)$
- Feature distillation
- match hidden representations (e.g., L2 / cosine loss)
Key knobs
- temperature $T$ (softness of targets)
- weight $\lambda$ (balance with supervised loss)
DINO
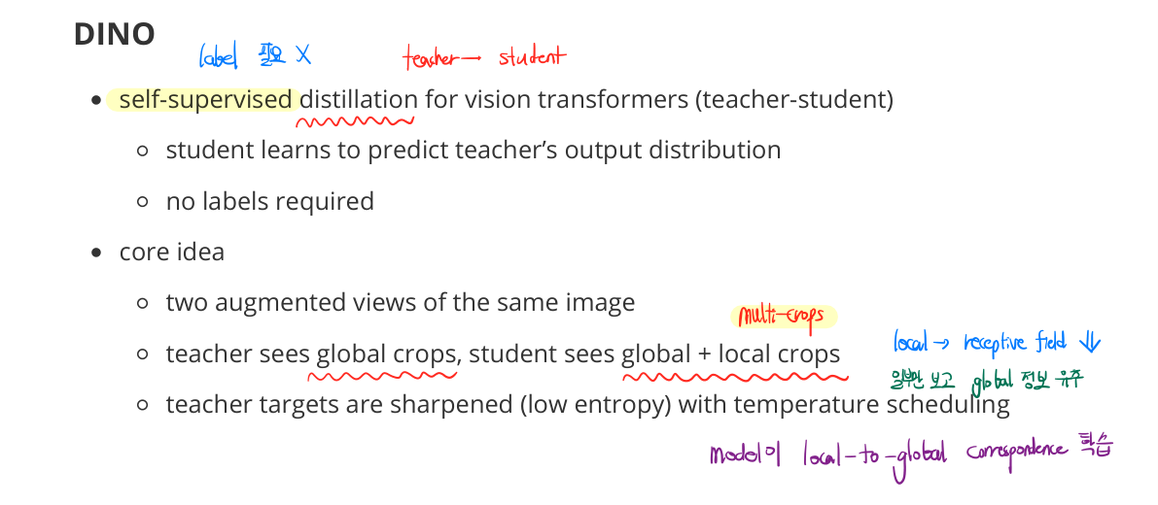
- self-supervised distillation for vision transformers (teacher-student)
- student learns to predict the teacher’s output distribution
- no labels required
Core idea
- two augmented views of the same image
- teacher sees global crops, student sees global + local crops
- teacher targets are sharpened (low entropy) with temperature scheduling
- model learns local-to-global correspondence
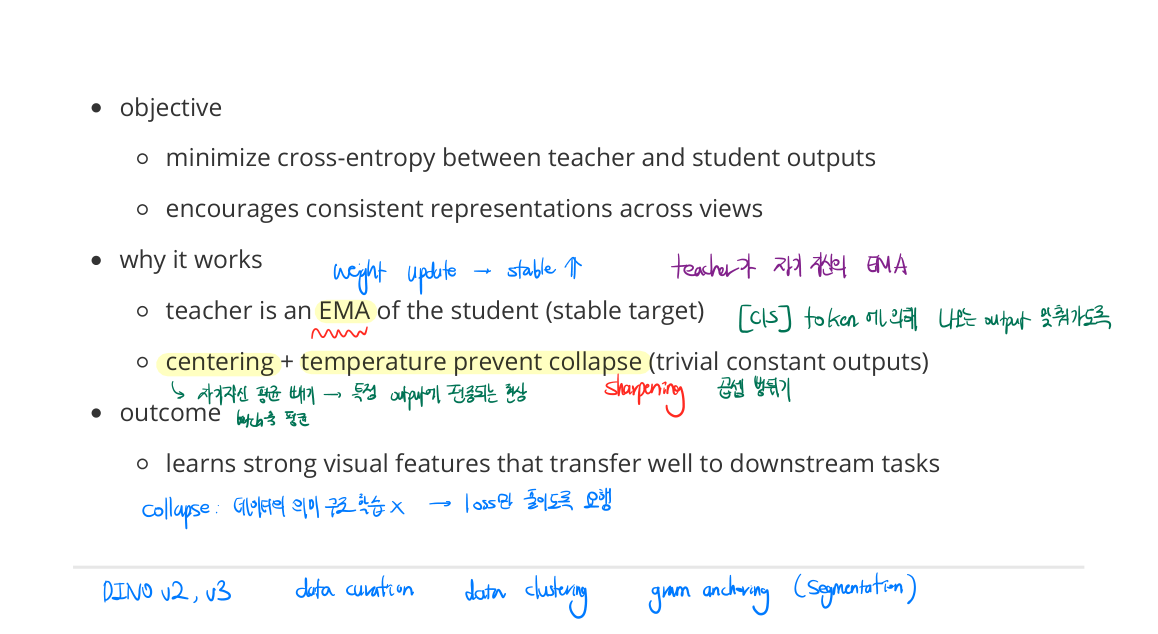
Objective
- minimize cross-entropy between teacher and student outputs
- encourages consistent representations across views
Why it works
- teacher is an EMA of the student (stable target)
- centering + temperature prevent collapse (trivial constant outputs)
Outcome
- learns strong visual features that transfer well to downstream tasks
ControlNet
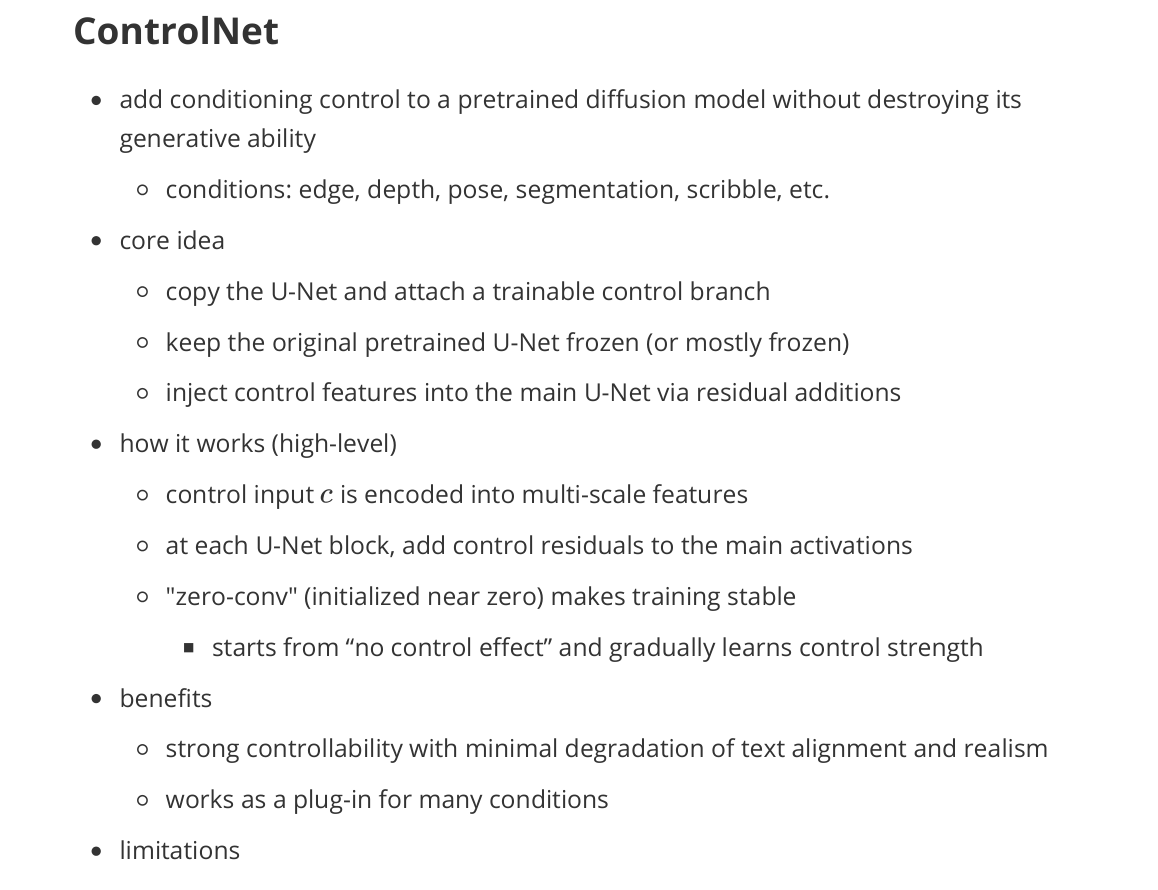

- add conditioning control to a pretrained diffusion model without destroying its generative ability
- conditions: edge, depth, pose, segmentation, scribble, etc.
Core idea
- copy the U-Net and attach a trainable control branch
- keep the original pretrained U-Net frozen (or mostly frozen)
- inject control features into the main U-Net via residual additions
How it works (high-level)
- control input $c$ is encoded into multi-scale features
- at each U-Net block, add control residuals to the main activations
- “zero-conv” (initialized near zero) makes training stable
- starts from “no control effect” and gradually learns control strength
Benefits
- strong controllability with minimal degradation of text alignment and realism
- works as a plug-in for many conditions
Limitations
- extra compute and memory (another branch)
- needs paired data (image + condition) or a condition extraction pipeline
T2I Adapter
- lightweight conditioning adapter for pretrained text-to-image diffusion
- similar use cases: edges, depth, pose, segmentation, style hints
Core idea
- add a small adapter network that encodes the condition into feature maps
- inject those features into the pretrained U-Net (often via residual connections)
- typically fewer parameters than ControlNet
- pretrained diffusion backbone stays frozen
How it works (high-level)
- condition encoder produces multi-scale representations
- features are fused into U-Net blocks (shallow additions)
- train only the adapter (and sometimes small projection layers)
Benefits
- parameter-efficient, faster to train, lower memory overhead
- easier to deploy when compute is tight
Limitations
- usually weaker controllability than full ControlNet
- capacity may be insufficient for complex spatial constraints