- These notes were prepared while studying for technical interviews (e.g., Snap Inc., KRAFTON, etc.).
- Each entry contains a concise English summary, key math expressions, and excerpts from my original handwritten/typed study notes.
These notes cover the modern continuous-time generative-modeling family: denoising diffusion, the score-based SDE viewpoint, classifier-free guidance, and the flow-matching reformulation that unifies them. The handwritten pages at the end derive the SDE / score-model / sampler / solver mechanics in detail.
Denoising Diffusion
- decomposing the mapping into a sequence of small, incremental transformations
- from a simple distribution (e.g., Gaussian noise)
- to a complex data distribution
- learn to reverse a gradual noising process
- instead of directly learning a single complex mapping from noise to data
DDPM (Denoising Diffusion Probabilistic Models)
- probabilistic diffusion model that defines a Markovian forward noising process
- data distribution → gradually corrupted by Gaussian noise → standard Gaussian
- closed-form transition in the noising (forward) process
- learns to reverse the noising process step by step using a neural network
- gradually denoising Gaussian noise estimated by the network (denoiser)
- true posterior is approximated by the learned reverse step
DDIM (Denoising Diffusion Implicit Models)
- assume a non-Markovian forward process
- defines a deterministic mapping from $x_t$ to $x_{t-1}$
- prediction → decomposed into clean data $x_0$ + noise vector to $t-1$ (+ stochastic term)
- skipping steps during sampling → faster inference with fewer steps (accelerating)
Classifier-Free Guidance (CFG)
- conditioning technique for diffusion models (conditional generation)
- does not require an external classifier
- by Bayes’ theorem
- $p(x_t \mid y) \propto p(y \mid x_t)\, p(x_t)$
- $\nabla_{x_t} \log p(x_t \mid y) = \nabla_{x_t} \log p(x_t) + \nabla_{x_t} \log p(y \mid x_t)$
- interpreted as approximating the Bayesian posterior $\nabla_{x_t} \log p(x_t \mid y)$
- by amplifying the likelihood term $\nabla_{x_t} \log p(y \mid x_t)$ without an explicit classifier
How it works
- train the model with and without conditioning
-
during sampling → combine conditional and unconditional predictions:
\[\tilde{\epsilon}_\theta(x_t, c) = (1 + w) \epsilon_\theta(x_t, c) - w \epsilon_\theta(x_t, \varnothing)\] - guidance scale $w \uparrow$ → stronger conditioning
- too large $w$ → diversity ↓
- pushes samples toward regions that better satisfy the condition
- interpolates between unconditional and conditional noise predictions
Score Function
- $\nabla_x \log p(x)$: gradient of log density
- describes how to move a noisy sample toward higher-density regions of the data distribution
Tweedie’s Formula
-
posterior mean estimation using variance-scaled score function:
\[\mathbb{E}[x_0 \mid x_t] = \frac{x_t + \sigma_t^2 \nabla_{x_t} \log p_t(x_t)}{\sqrt{\bar{\alpha}_t}}\] - denoising ≃ estimating the posterior mean using the score of the noisy distribution
- in diffusion models: how far to move in the score direction to recover the clean signal
Flow Matching
- reframes generative modeling as learning a continuous transport
- from a simple distribution to the data distribution (push-forward)
- velocity regression without explicitly optimizing likelihoods or solving expensive ODEs during training
- variants dependent on how to define a conditional flow mapping (transformation)
- diffusion models: a special case of flow matching
- where the target velocity corresponds to the score-induced reverse-time dynamics
- diffusion models: a special case of flow matching
Normalizing Flow
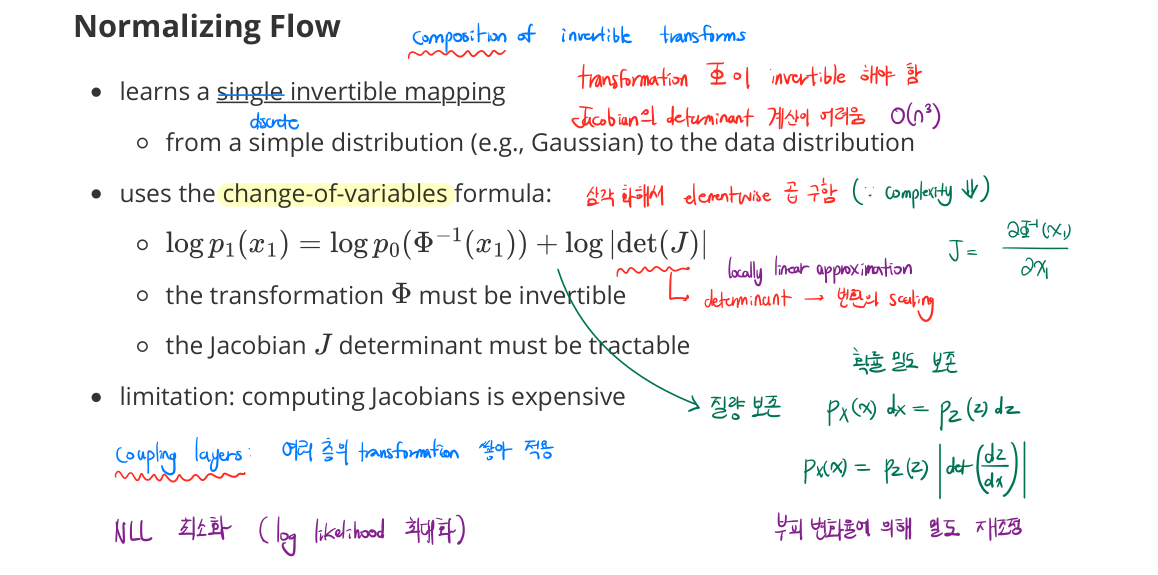
- learns a single invertible mapping
- from a simple distribution (e.g., Gaussian) to the data distribution
- uses the change-of-variables formula:
- $\log p_1(x_1) = \log p_0(\Phi^{-1}(x_1)) + \log \lvert \det J \rvert$
- the transformation $\Phi$ must be invertible
- the Jacobian $J$ determinant must be tractable
- limitation: computing Jacobians is expensive
- $O(n^3)$ in general
- triangularization gives elementwise product → $O(n)$
Continuous Normalizing Flow (CNF)
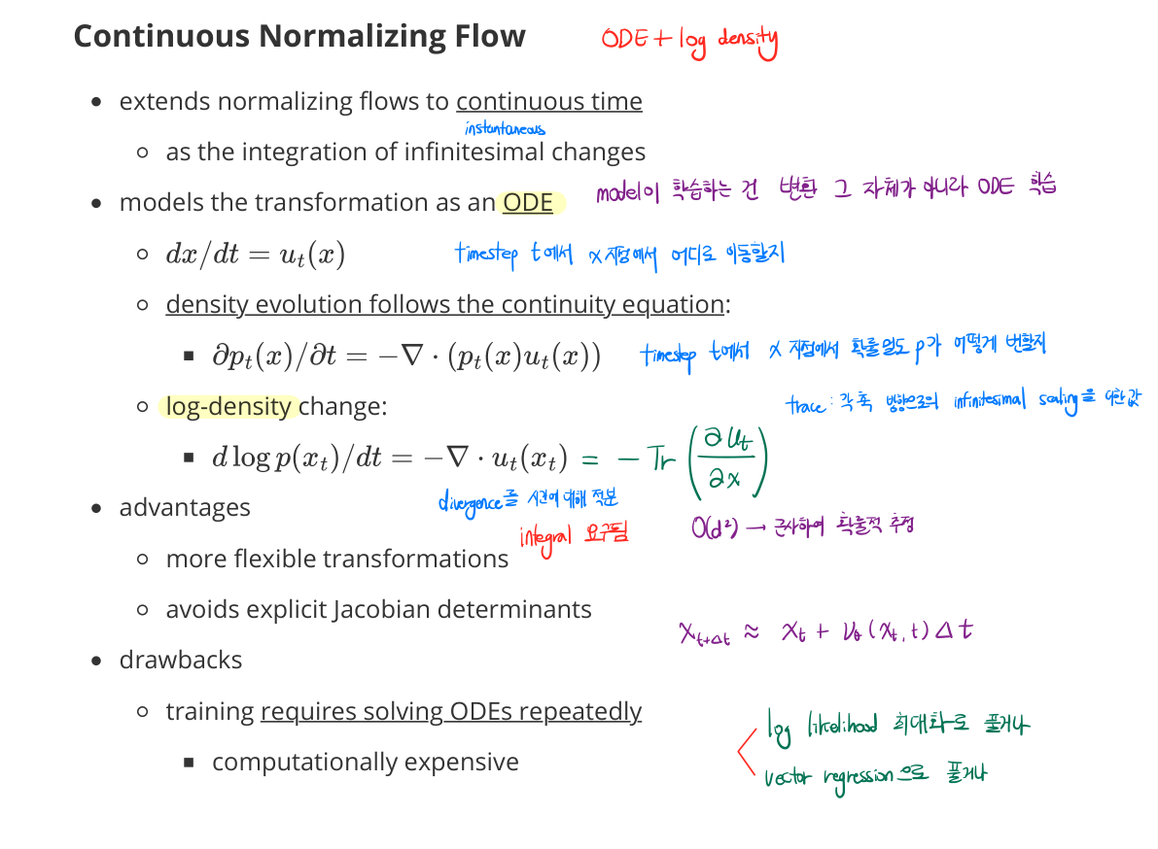
- extends normalizing flows to continuous time
- as the integration of infinitesimal changes
- models the transformation as an ODE
- $dx/dt = u_t(x)$
- density evolution follows the continuity equation:
- $\partial p_t(x) / \partial t = -\nabla \cdot (p_t(x)\, u_t(x))$
- log-density change:
- $\dfrac{d \log p(x_t)}{dt} = -\nabla \cdot u_t(x_t) = -\mathrm{tr}(\partial u_t / \partial x)$
- advantages
- more flexible transformations
- avoids explicit Jacobian determinants
- drawbacks
- training requires solving ODEs repeatedly
- computationally expensive
- training requires solving ODEs repeatedly
Flow Matching Objective
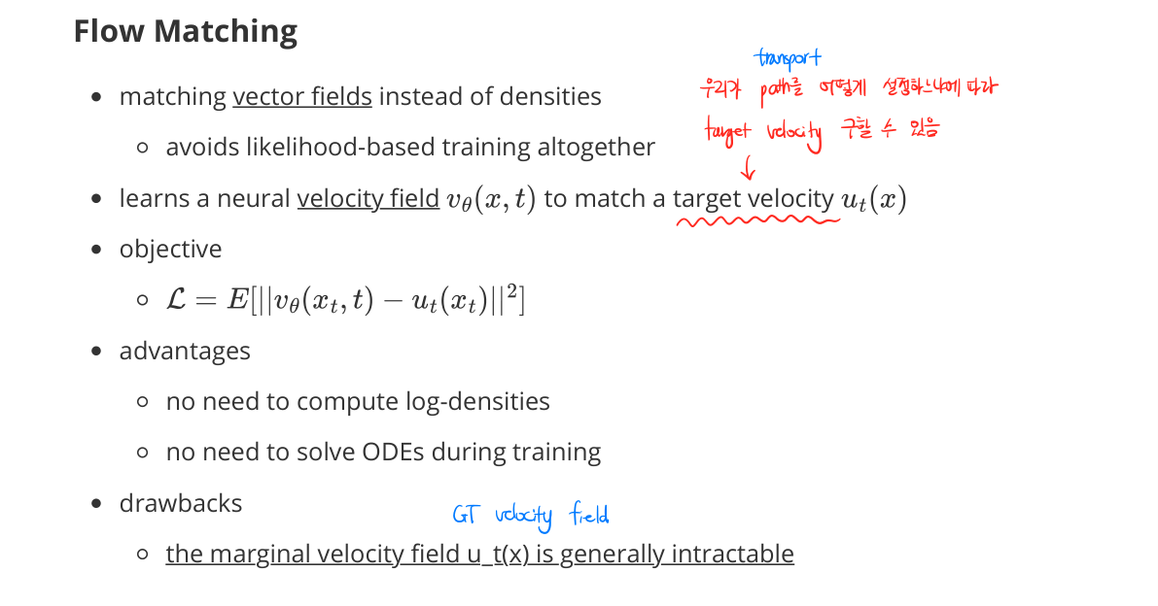
- matching vector fields instead of densities
- avoids likelihood-based training altogether
- learn a neural velocity field $v_\theta(x, t)$ to match a target velocity $u_t(x)$
- target velocity is determined by how the transport path is chosen
- advantages: no log-density computation, no ODE solves during training
- drawback: the marginal velocity field $u_t(x)$ is generally intractable
Conditional Flow Matching (CFM)
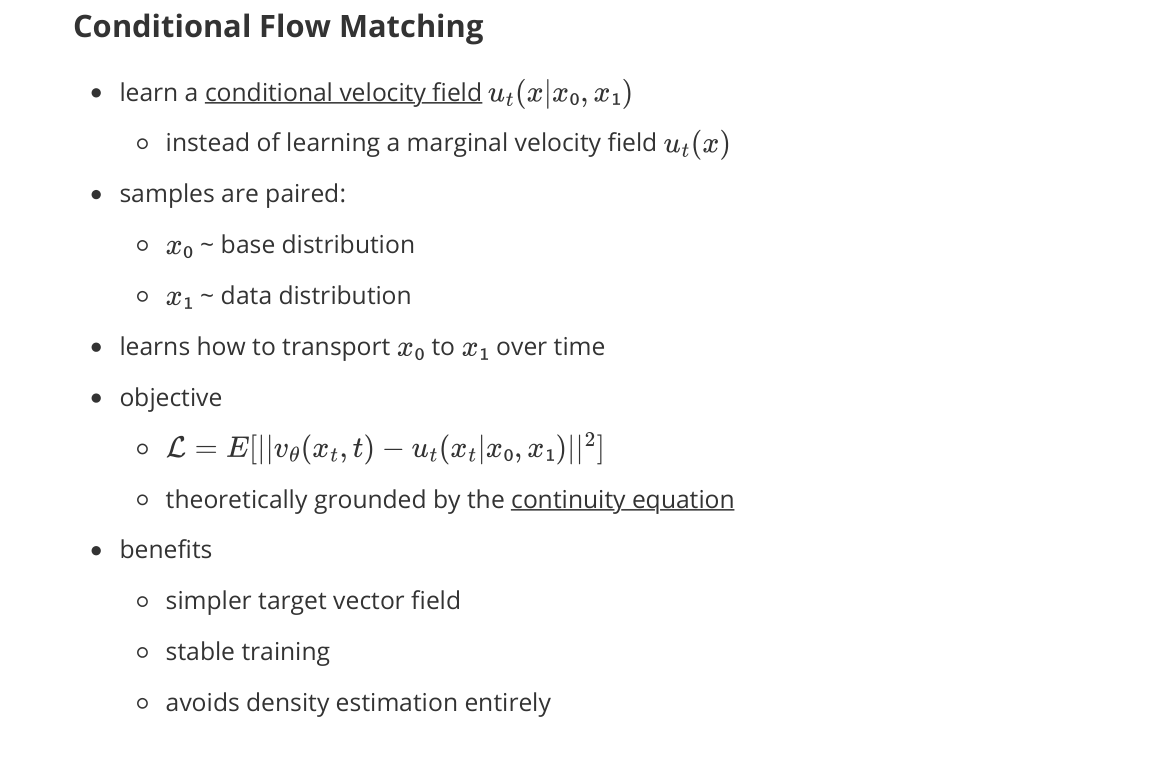
- learn a conditional velocity field $u_t(x \mid x_0, x_1)$
- instead of learning a marginal velocity field $u_t(x)$
- samples are paired:
- $x_0 \sim$ base distribution
- $x_1 \sim$ data distribution
- learns how to transport $x_0$ to $x_1$ over time
- objective
- $\mathcal{L} = \mathbb{E}[|v_\theta(x_t, t) - u_t(x_t \mid x_0, x_1)|^2]$
- theoretically grounded by the continuity equation
- benefits
- simpler target vector field
- stable training
- avoids density estimation entirely
Rectified Flow
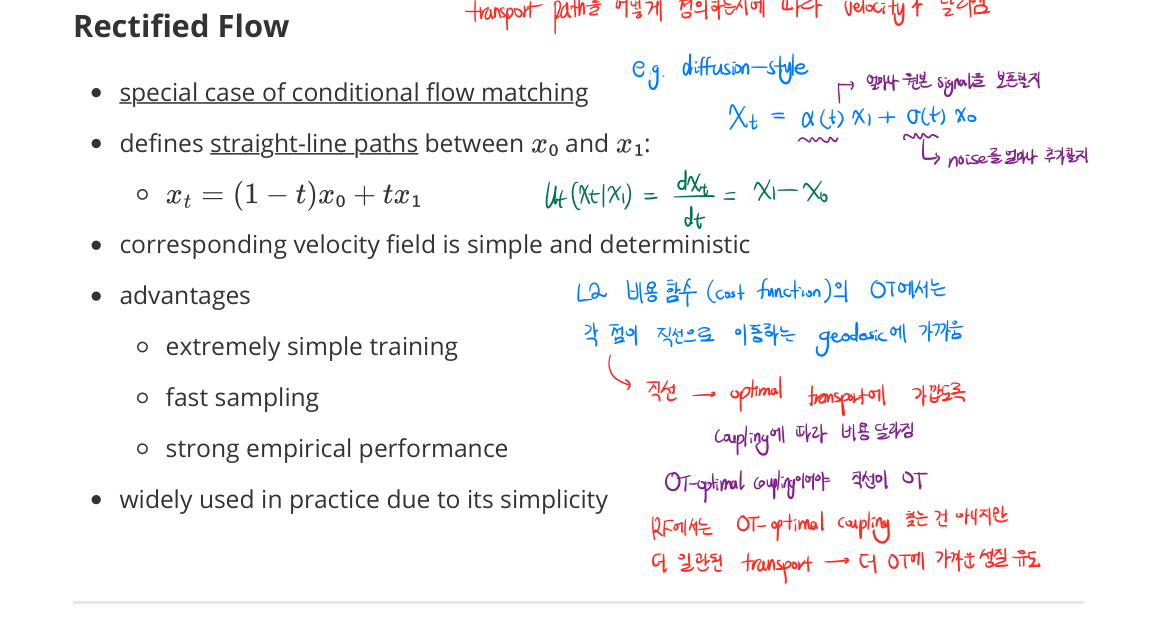
- special case of conditional flow matching
- defines straight-line paths between $x_0$ and $x_1$:
- $x_t = (1 - t) x_0 + t x_1$
- corresponding velocity field is simple and deterministic: $u_t = x_1 - x_0$
- advantages
- extremely simple training
- fast sampling
- strong empirical performance
- widely used in practice due to its simplicity
- OT-optimal coupling makes the transport closer to a geodesic
Diffusion Transformer (DiT)
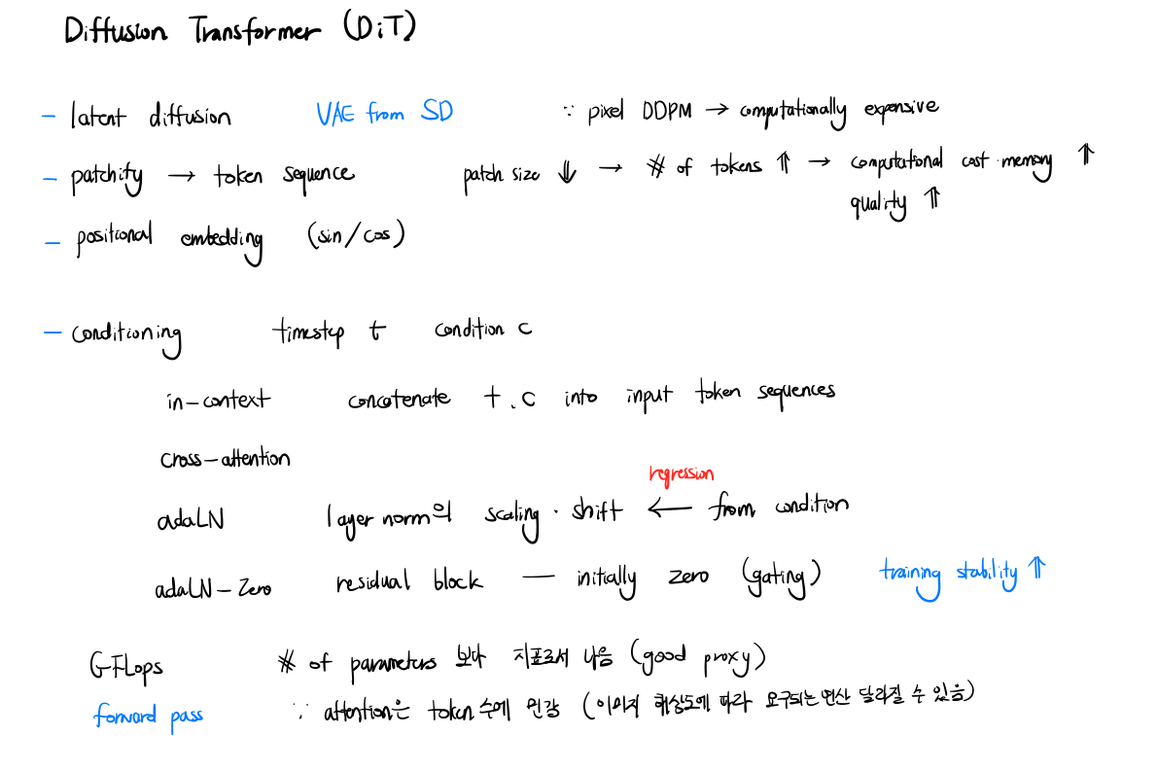
- latent diffusion: VAE from Stable Diffusion, pixel-space DDPM computationally expensive
- Patchify
- token sequence with patch size $N$
- smaller patch → more tokens, higher computational cost
- quality ↑, memory ↑
- Positional embedding: sinusoidal
- Conditioning
- timestep $t$, condition $c$ (e.g., class label)
- in-context: concatenate $t, c$ into input token sequence
- cross-attention: regression
- adaLN: scaling/shifting of LayerNorm from condition
- adaLN-Zero: residual block initially zero-gated → training stability
- GFLOPs is a better proxy than parameter count for compute cost
- forward pass attention is sensitive to token count (image resolution affects required compute)
SDE-based Score Model

- diffusion as a stochastic process
Forward process
\[dx = f(x, t)\, dt + g(t)\, dW_t, \quad dW_t \sim \mathcal{N}(0, \Sigma)\]- $f$: drift, $g$: diffusion coefficient, $W_t$: Brownian motion
Reverse-time SDE
\[dx = \left[ f(x, t) - g(t)^2 s_\theta(x, t) \right] dt + g(t)\, d\bar{W}_t\]- $s_\theta(x, t) = \nabla_x \log p_t(x)$: score function (drift)
Probability Flow ODE
\[\frac{dx}{dt} = f(x, t) - \frac{1}{2} g(t)^2 s_\theta(x, t)\]- deterministic; diffusion sampling reduces to integrating ODE / SDE
VP-SDE (Variance Preserving)
- $\text{Var}(x_t)$ does not blow up over time
- DDPM’s discrete-time forward process → continuous version
- $x_t = \sqrt{\bar{\alpha}_t}\, x_0 + \sqrt{1 - \bar{\alpha}_t}\, \epsilon$
- $\text{SNR}(t) = \bar{\alpha}_t / (1 - \bar{\alpha}_t)$
- forward SDE: $dx = -\tfrac{1}{2} \beta(t) x\, dt + \sqrt{\beta(t)}\, dW_t$
- reverse PF-ODE: $\frac{dx}{dt} = -\tfrac{1}{2} \beta(t) x - \tfrac{1}{2} \beta(t) s_\theta(x, t)$
VE-SDE (Variance Exploding)
- NCSN-style: variance grows over time
- $x_t = x_0 + \sigma(t) \epsilon$
- $\text{SNR}(t) \propto 1 / \sigma(t)^2$
- forward: $dx = g(t)\, dW_t$ (drift = 0)
- learns score at many noise levels: annealed Langevin dynamics
Prediction Targets
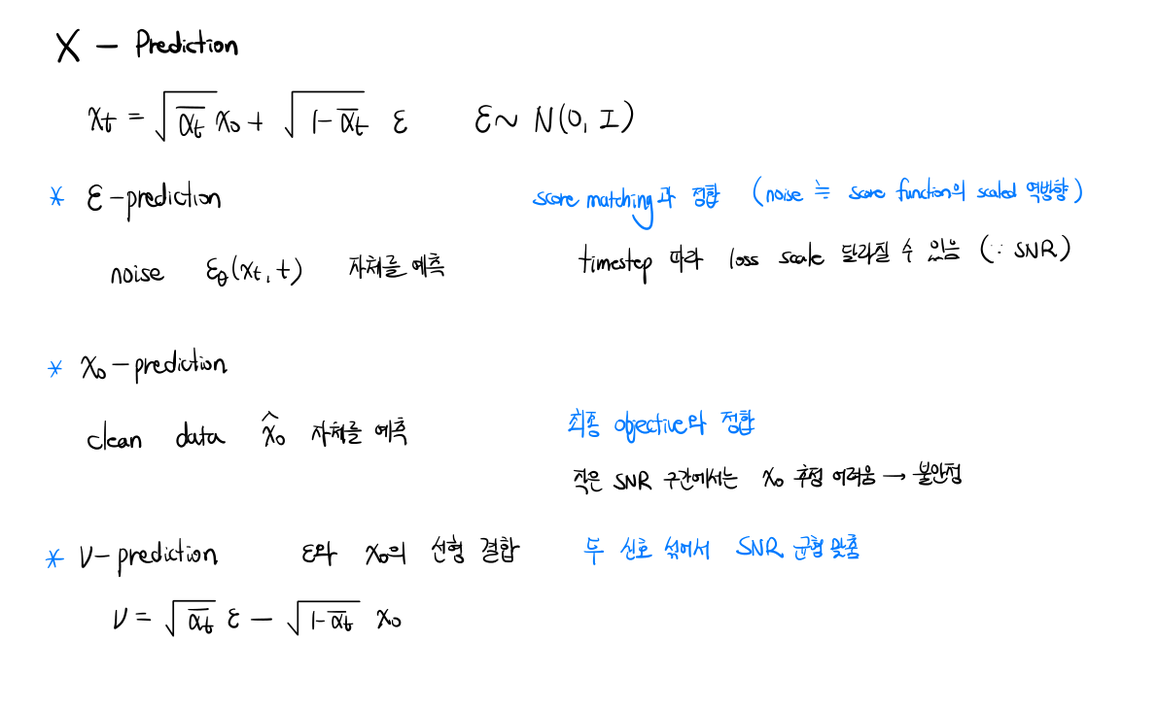
- $\epsilon$-prediction: predict the noise $\epsilon_\theta(x_t, t)$ itself
- aligns with score matching (noise = scaled negative of the score function)
- loss scale can vary by timestep (due to SNR)
- $x_0$-prediction: predict the clean data $\hat{x}_0$ directly
- aligns with the final objective
- unstable at low SNR (hard to estimate $x_0$)
- v-prediction: linear combination of $\epsilon$ and $x_0$
- $v = \sqrt{\bar{\alpha}_t}\, \epsilon - \sqrt{1 - \bar{\alpha}_t}\, x_0$
- mixes the two signals to balance SNR across timesteps
Noise Scheduler
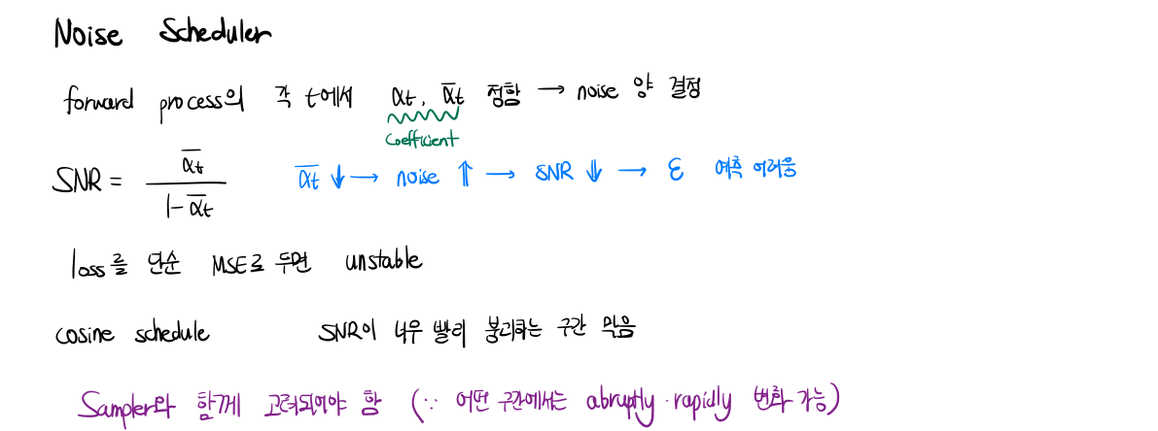
- forward process: choose $\alpha_t, \bar{\alpha}_t$ at each $t$ → determines noise amount
- SNR $= \bar{\alpha}_t / (1 - \bar{\alpha}_t)$
- $\bar{\alpha}_t \downarrow$ → noise $\uparrow$ → SNR $\downarrow$ → $\epsilon$ prediction harder
- naive MSE loss can be unstable
- cosine schedule: prevents SNR from collapsing too quickly
- must be considered together with the sampler
Sampler & Solver
Sampler
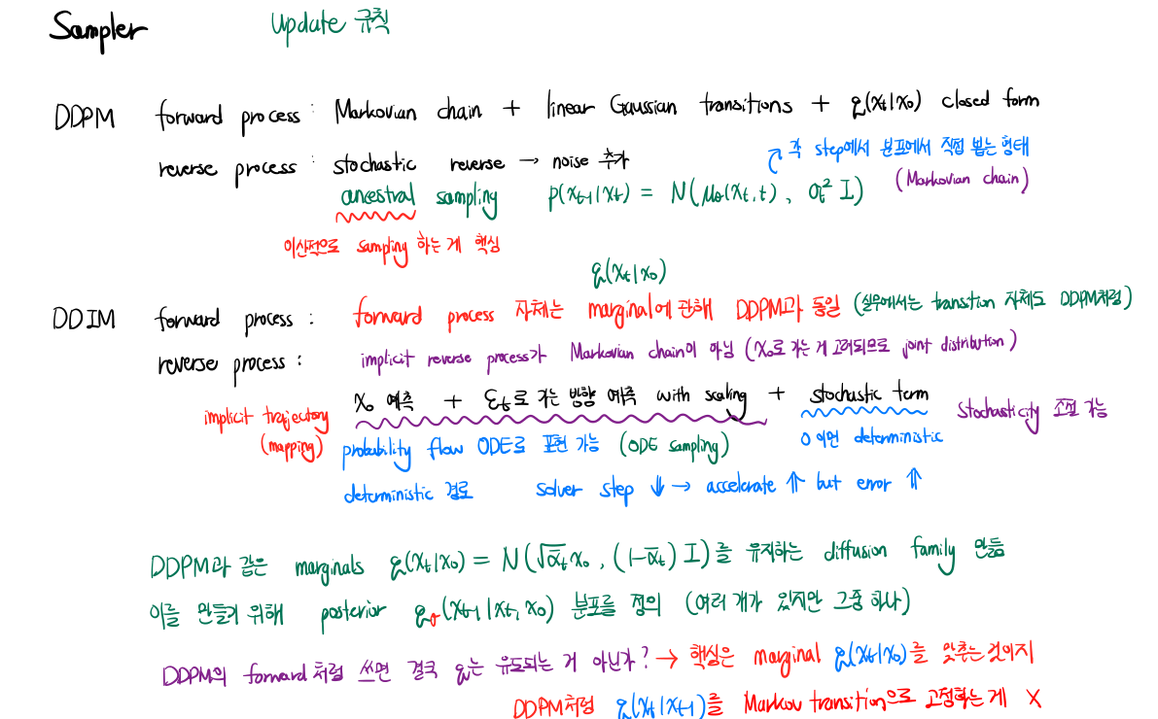
- DDPM: stochastic, many-step ancestral sampling
- forward process: Markovian chain + linear Gaussian transitions + $q(x_t \mid x_0)$ closed-form
- reverse process: stochastic; each step samples noise directly from the posterior distribution
- $p_\theta(x_{t-1} \mid x_t) = \mathcal{N}(\mu_\theta(x_t, t), \sigma_\theta^2 I)$
- core idea: discrete-time sampling
- DDIM: deterministic, fast
- forward process: same marginals as DDPM, but the transition itself is not Markovian
- reverse process: implicit (not a Markov chain), considered as a joint distribution over $x_0$
- reverse step: predict $\hat{x}_0$ + predict the direction toward $x_t$ (with scaling) + optional stochastic term
- implicit trajectory: controllable stochasticity (η in the reverse step)
- $\eta = 0$ → deterministic; can be mapped to a probability-flow ODE
- deterministic path → solver step $N \downarrow$ accelerates but introduces discretization error
Solver
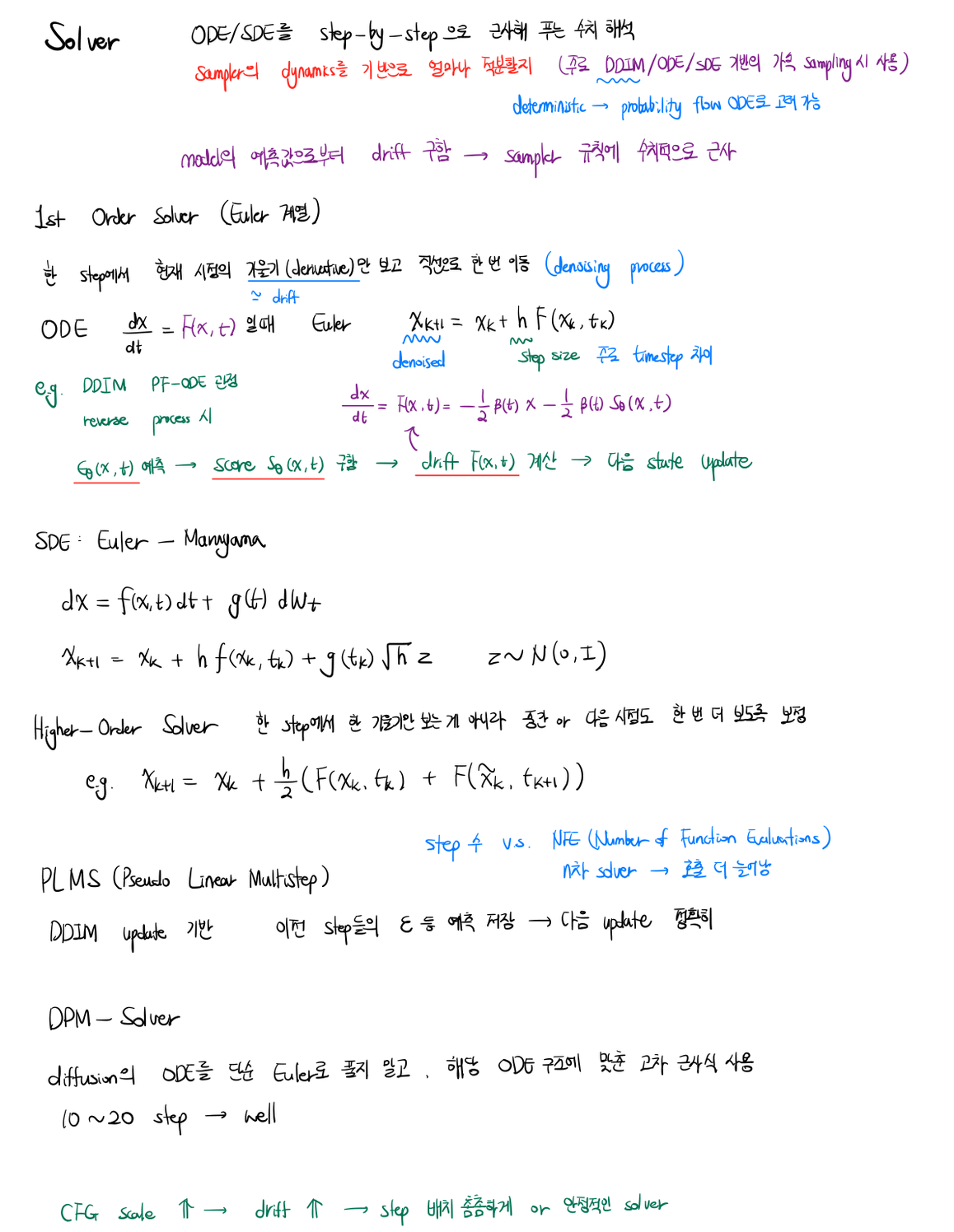
- diffusion sampling is solving an ODE / SDE step by step (numerical approximation)
- the sampler decides how much to integrate based on the model’s drift / score; the solver decides how each step is numerically computed
1st-order solvers (Euler family)
- one derivative per step, move along a straight line for one step
- for ODE $dx/dt = F(x, t)$: $x_{k+1} = x_k + h\, F(x_k, t_k)$
- DDIM is a PF-ODE-form Euler step: predict $\varepsilon_\theta(x_t, t)$ → score $s_\theta(x_t, t)$ → drift $F(x_t, t)$ → update $x_{t-1}$
- SDE Euler–Maruyama: $x_{k+1} = x_k + h\, f(x_k, t_k) + g(t_k)\sqrt{h}\, z, \; z \sim \mathcal{N}(0, \Sigma)$
Higher-order solvers
- evaluate the derivative at intermediate / next time points and average
- e.g. Heun: $x_{k+1} = x_k + \tfrac{h}{2}\big(F(x_k, t_k) + F(x_{k+1}, t_{k+1})\big)$
- more accurate per step but increases the number of function evaluations (NFE)
- PLMS (Pseudo Linear Multistep): multi-step solver that reuses cached $\varepsilon$-predictions from previous steps → higher accuracy without extra NFE
- DPM-Solver: solver tailored to the diffusion ODE structure rather than treating it as a generic ODE → ~10–20 steps with good quality
Practical notes
- choice of solver determines the sample quality vs speed tradeoff
- with strong CFG / large drift, denser step placement near the high-drift region gives a more stable solver
ADM, Diffusion Likelihood & Efficient DiT
ADM (Diffusion Models Beat GANs)
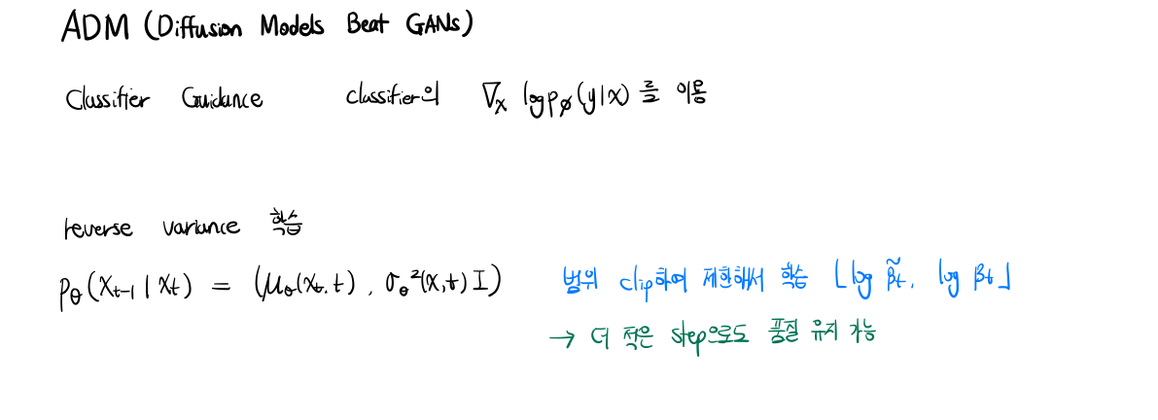
- Classifier Guidance: uses classifier’s $\nabla_x \log p_\phi(y \mid x)$ for conditioning
- reverse variance learned (rather than fixed)
- $p_\theta(x_{t-1} \mid x_t) = \mathcal{N}(\mu_\theta(x_t, t), \sigma_\theta^2(x_t, t) I)$
- log-variance clipped to a learned range $[\log \tilde{\beta}_t, \log \beta_t]$
- even fewer steps preserve quality
Diffusion Likelihood
- many small stochastic transitions → exact likelihood is hard to compute
- discrete: ELBO
- continuous: Score-SDE / probability-flow ODE → CNF-style likelihood computation
Efficient DiT: Flash Attention & KV Cache
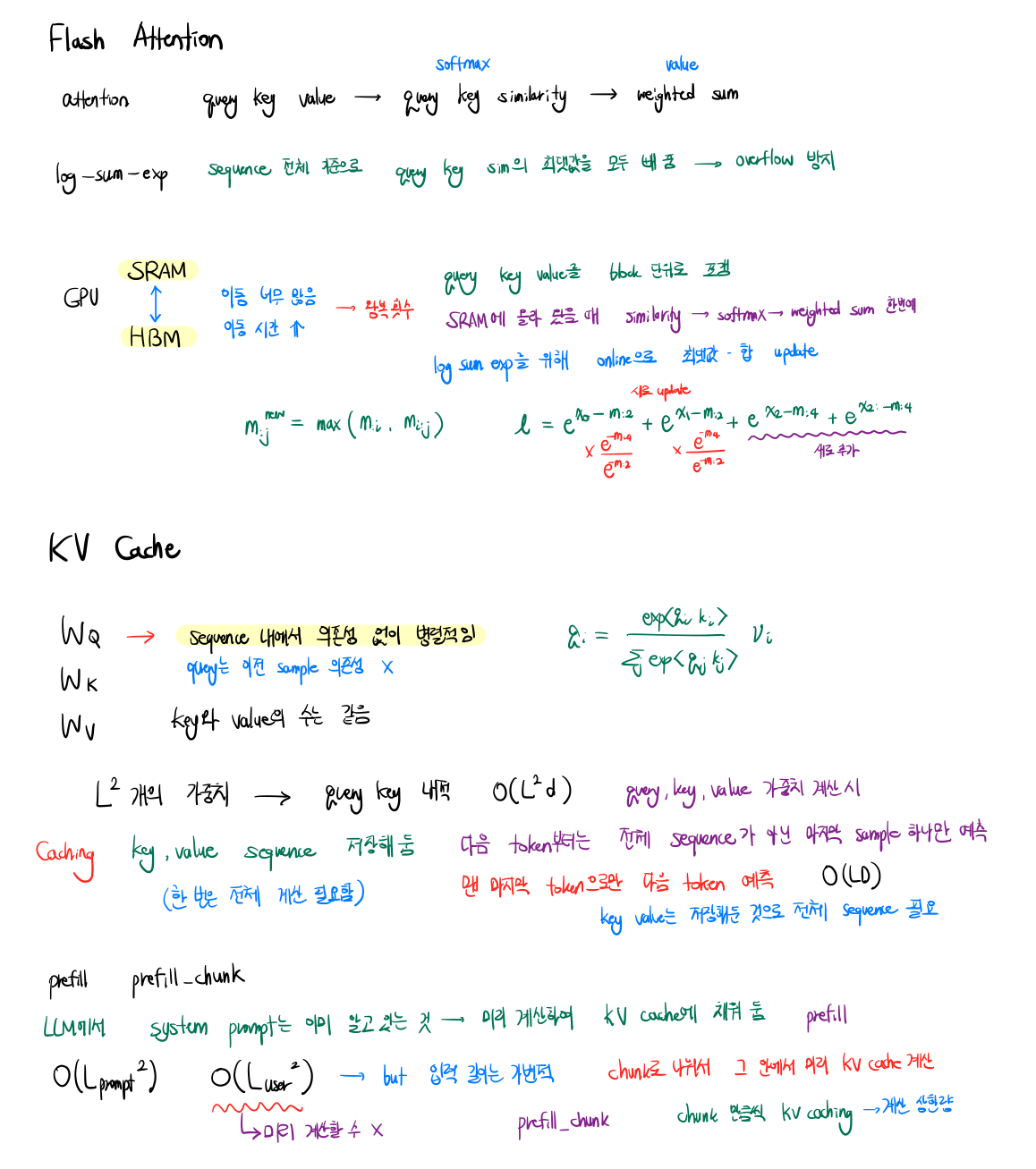
Flash Attention
- I/O-aware exact attention with tiled SRAM/HBM memory access
- query · key → softmax-similarity → weighted sum
- log-sum-exp trick: subtract max over entire sequence to avoid overflow
- SRAM tiling
- load $Q, K, V$ in blocks into SRAM (fast on-chip memory)
- GPU HBM ↔ SRAM data movement is the bottleneck → reduce round trips
- compute similarity, softmax, and weighted sum on-chip in one pass
-
online running max + log-sum-exp update
\[m_{:j} \;=\; \max\!\left(m_{:i},\; m_{i:j}\right)\] \[\ell_{:j} \;=\; e^{\,m_{:i} - m_{:j}}\, \ell_{:i} \;+\; e^{\,m_{i:j} - m_{:j}}\, \ell_{i:j}\]- $m_{:i}$ and $\ell_{:i}$, running max and normalizer over rows $0..i$ (state before this block)
- $m_{i:j}$ and $\ell_{i:j}$, max and normalizer over the current block (rows $i..j$)
- $m_{:j}$ and $\ell_{:j}$ on the left-hand sides, the merged running state covering rows $0..j$ after this block
- each contributor is rescaled by $e^{m_{:i} - m_{:j}}$ (or $e^{m_{i:j} - m_{:j}}$) so both normalizers share the same reference max and can be summed safely
KV Cache
- weight matrices: $W_Q, W_K, W_V$ produce query/key/value at each token
- query has no dependence on previous samples (within one decoding step)
- key/value count grows with sequence length $L$
- compute cost per token: $O(L d^2)$
- cached key/value tensors are stored once and reused across decoding steps
- next token: only the last query needs to be computed against the full cached KV
- prefill vs decode
- prefill: process the known prompt (system prompt etc.) once → fill the KV cache: $O(L_{\text{prompt}} d)$
- decode: predict next token from cached KV → $O(L d)$ per step
- prefill chunk
- split a large prompt into chunks
- compute KV cache chunk-by-chunk to bound peak compute