- These notes were prepared while studying for technical interviews (e.g., Snap Inc., KRAFTON, etc.).
- Each entry contains a concise English summary, key math expressions, and excerpts from my original handwritten/typed study notes.
These notes cover the mechanics that make deep networks trainable: how gradients are computed, how parameters are updated efficiently, how to choose initial values, and how activations shape gradient flow.
Backpropagation
- efficiently compute gradients of a loss with respect to all parameters
- based on the chain rule
- enables training of deep neural networks via gradient-based optimization
- propagate error signals from the output layer backward through the network
Chain rule
- reusing intermediate derivatives → avoid redundant computations
Computation flow
- forward pass: compute activations and loss
- backward pass: compute gradients layer by layer from output to input
- each layer contributes a local derivative → gradients = products of local derivatives
Dynamic programming
- cache intermediate activations during the forward pass
- reuse activations during the backward pass to compute gradients efficiently
- complexity: linear in the number of parameters
Gradient Accumulation
- simulate a larger batch size by accumulating gradients over multiple forward/backward passes
- delays parameter updates until enough gradients are accumulated
- useful for overcoming GPU memory limits
Gradient Checkpointing
- store only a subset of activations during the forward pass → saving memory
- decompose the network into segments with checkpoints
- recompute the rest during backpropagation
- reruns forward computation from the nearest checkpoint when needed
- trade additional computation for reduced memory usage
Optimizer

- update model parameters to minimize a loss function
- determine update direction and step size
Gradient Descent
- iterative optimization algorithm using the full dataset
- update parameters in the direction of the negative gradient of the loss function
- moving parameters toward the direction of steepest descent
- assumption: local surface is locally smooth
- computationally expensive
Learning Rate

- hyperparameter $\eta$ controlling how aggressively parameters are updated
Step Size
- step size $= \eta \cdot |\nabla \mathcal{L}(\theta)|$ (learning rate × gradient magnitude)
- the actual magnitude of the parameter update
- Gradient Clipping
- decouple the step size from the gradient magnitude
- prevent exploding gradients without artificially stalling convergence
- only reducing the learning rate may not solve the problem
Stochastic Gradient Descent (SGD)
- leverage a mini-batch to estimate the gradient instead of using the full dataset
- produce a noisy estimate of the true gradient
- pros
- faster iterations & scalable to large datasets
- noise can help escape shallow local minima and saddle points
- cons
- may oscillate around minima
- especially in high-curvature directions
- noisy updates
- may oscillate around minima
- computational efficiency v.s. better generalization
Momentum
- accumulate a velocity vector
- builds speed in consistent descent directions
- damps oscillations in steep directions → zig-zagging ↓
RMSProp
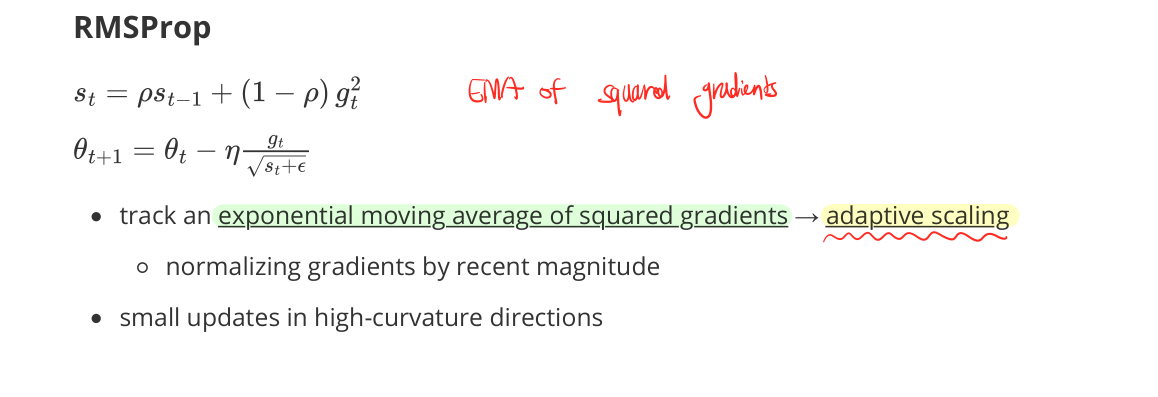
- track an exponential moving average of squared gradients → adaptive scaling
- normalize gradients by recent magnitude
- small updates in high-curvature directions
Adam

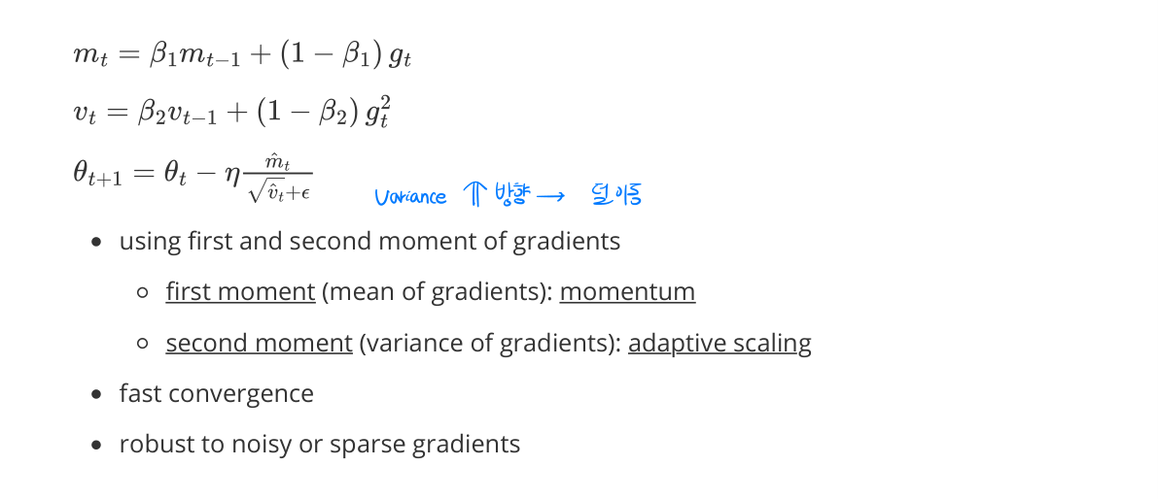
- using first and second moments of gradients
- first moment (mean of gradients): momentum
- second moment (variance of gradients): adaptive scaling
- fast convergence
- robust to noisy or sparse gradients
Activation Function
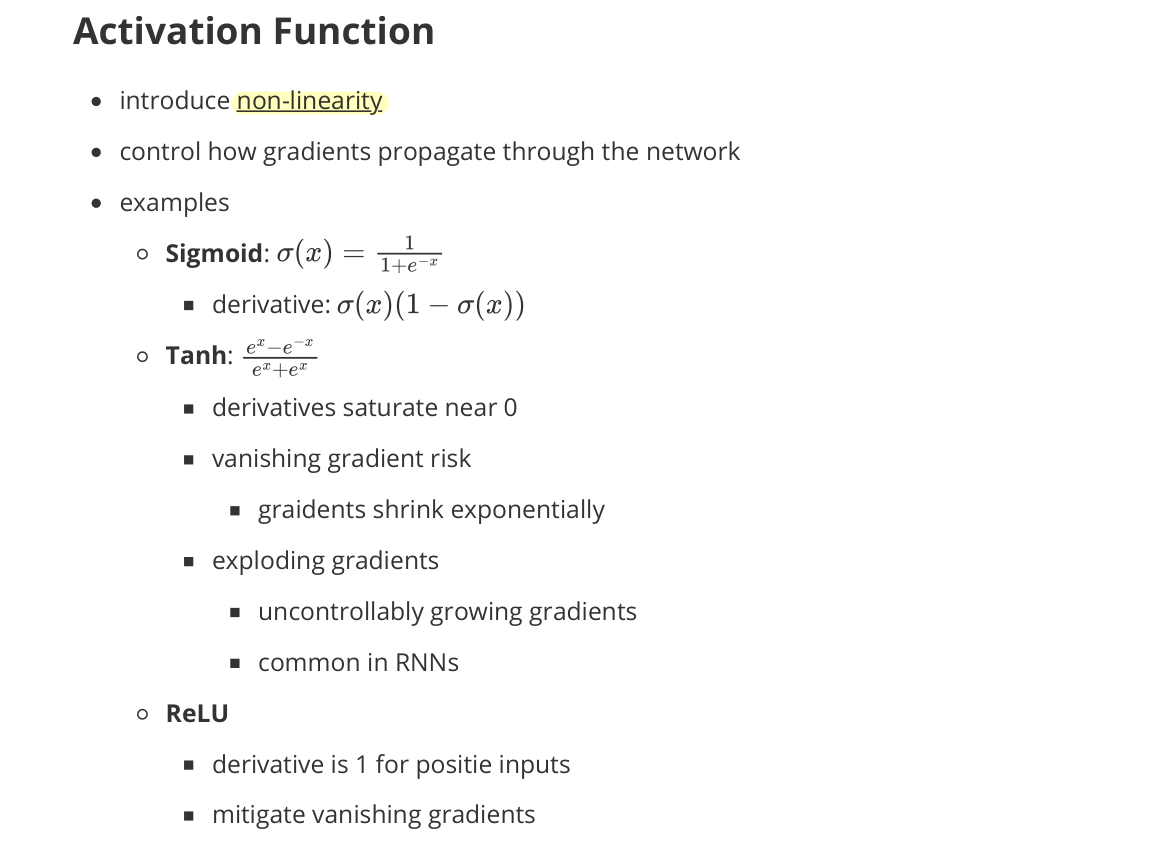
- introduce non-linearity
- control how gradients propagate through the network
- examples
- Sigmoid: $\sigma(x) = \frac{1}{1 + e^{-x}}$
- derivative: $\sigma(x)(1 - \sigma(x))$
- Tanh: $\tanh(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}}$
- derivatives saturate near 0
- vanishing gradient risk
- gradients shrink exponentially
- exploding gradients
- uncontrollably growing gradients
- common in RNNs
- ReLU
- derivative is 1 for positive inputs
- mitigates vanishing gradients
- example variants: Leaky ReLU, GELU
- Sigmoid: $\sigma(x) = \frac{1}{1 + e^{-x}}$
Initialization

- choosing initial values of model parameters before training
- affects gradient flow and training stability
- poor initialization → vanishing or exploding gradients & failed convergence
- during backpropagation
- weights ↓ → gradients ↓ (shrinking)
- weights ↑ → gradients ↑ (exploding)
- preserve variance of activations and gradients across layers
- keep the variance of activations roughly constant
Random Initialization
- break symmetry between neurons
- but naive variance choices → instability ↑
Xavier Initialization
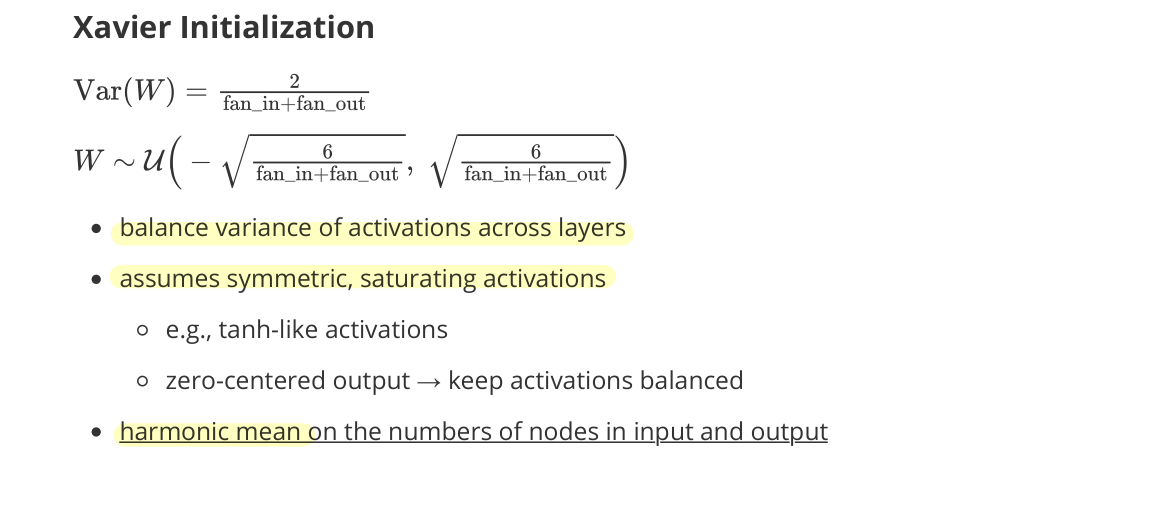
- balance variance of activations across layers
- assumes symmetric, saturating activations
- e.g., tanh-like activations
- zero-centered output → keep activations balanced
- harmonic mean on the numbers of nodes in input and output
He (Kaiming) Initialization
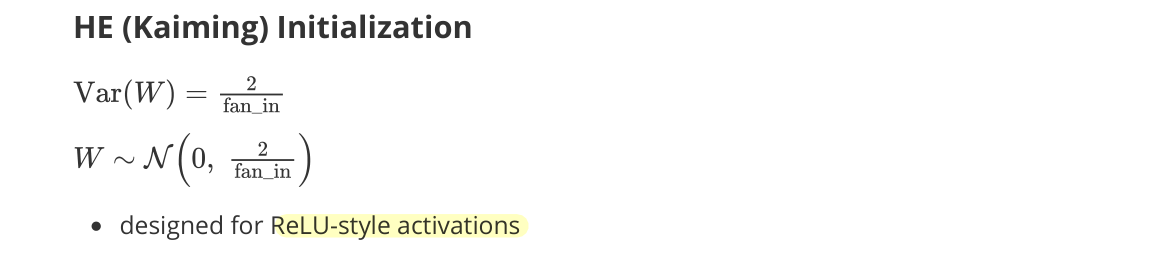

- designed for ReLU-style activations (e.g., ReLU, Leaky ReLU, GELU)
- compensate for ReLU’s sparsity
- about half of activations are zero
- scaling by 2 → preserve activation variance and gradient flow